UNet
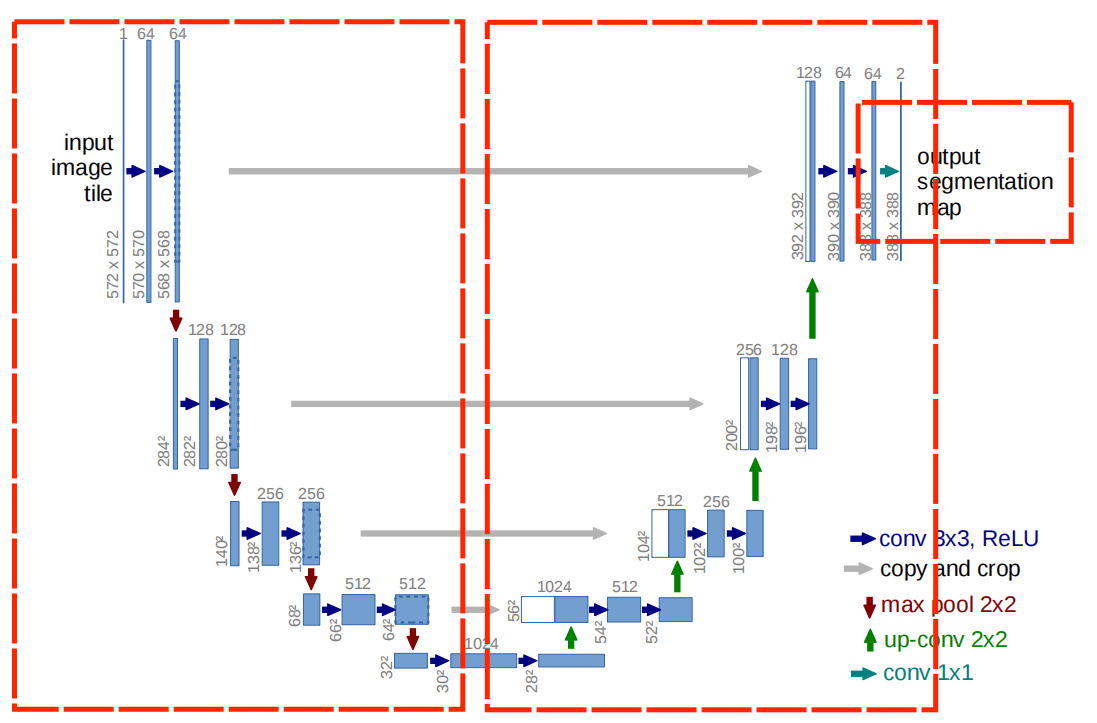
U-Net作为一个强大的语义分割模型,论文链接,可以通过使用较少数据进行训练即可得到不错的效果,下图是原论文中给出的U-Net的网络结构,概括为encode+decode,下图中主要把它从左到右分为三个部分:encode、decode、output,其中encode与decode之间的连接关系包括直接concat和bottleneck。
1. U-Net:
1.1 Encoder和Decoder:
上图中的最左边的框框里,按照图里的顺序命名为encoder1-4、decoder4-1和encoder5吧,其实这个结构可以概括为卷积与最大池化的堆叠,当然了encoder的结构也可以换成VGG、ResNet等网络。
encoder1-4输出的feature map,都会被当作下一层的输入,并且和对应decoder里面的部分进行特征融合(上采样+堆叠),decoder5-2输出的feature map,也都会当作下一层的输入,并于encoder对应的部分进行特征融合,至于卷积核尺寸和特征图的层数图上都表明的很清楚了,这里就不在赘述了,哈哈哈哈。
1.2 转置卷积:
这里使用了逆卷积来进行上采样,除逆卷积之外,我还看到好多人用了双线性插值(这个貌似是得改通道数),之后再把双线性插值补上,这里贴上两个官网给出的链接:逆卷积动图,逆卷积论文,非常值得参考,下面我简单的概述一下。
# pytorch官网源码
#https://pytorch.org/docs/stable/generated/torch.nn.ConvTranspose2d.html#torch.nn.ConvTranspose2d
torch.nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros', device=None, dtype=None)
# 这里是pytorch官方给出的代码
torch.nn.ConvTranspose3d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros', device=None, dtype=None)
# 具体参数解释
#in_channels (int) – 输入图像中的通道数
#out_channels (int) – 卷积产生的通道数
#kernel_size (int or tuple) – 卷积核的大小
#stride (int or tuple, optional) – 卷积的步幅。默认值:1
#padding (int or tuple, optional) – dilation * (kernel_size - 1) - 零填充将添加到输入中每个维度的两侧。默认值:0
#output_padding (int or tuple, optional) – 添加到输出形状中每个维度一侧的额外尺寸。默认值:0
#groups (int, optional) – 从输入通道到输出通道的阻塞连接数。默认值:1
#bias (bool, optional) – 如果True,则向输出添加可学习的偏差。默认:True
#dilation (int or tuple, optional) – 内核元素之间的间距。默认值:1
先简单地总结一个泛化的实现思路:(建议对比着动图看,蓝色是输入,绿色是输出。)
(1)对于输入的特征图A进行一些变换,得到新的特征图A‘;
(2)对新的卷积核进行设置,得到新的卷积核设置;
(3)用新的卷积核在新的特征图上做正常的卷积操作(stride为1),即可得到最终的结果。
假设输入为特征图A(H,W),下面用H的处理过程进行举例,W同理。 首先,只考虑stride,对A进行插值(interpolation),在A的高度方向每行都插入一行0,共插入$stride-1$行0,上图左侧stride为1(这是最基础的转置卷积,可以先无视外面的虚线框,下面就会讲明),右侧stride为2。
然后,再来考虑padding,对A进行填充,在其外侧,填入$kernel_size-padding-1$圈0,这也就解释清楚了,最基础的转置卷积那张图的虚线框了,上图左侧的padding为2、stride为1,右侧则是再加上了stride的形式。
那么即可得出结论最终输出的高度计算公式为:$H_{out} = \frac{[H_{in}+(stride-1)+2\times(kernel_size-padding-1]}{stride’}+1$,当然了这里的$stride’=1$,所以增大padding会让最终输出的图像大小减小,下面是官网给出的关于ConvTranspose3d的公式:
\[D_{out} = (D_{in}-1)×stride[0]-2×padding[0]+dilation[0]×(kernel\_size[0]-1)+output\_padding[0]+1\] \[H_{out} = (H_{in}-1)×stride[1]-2×padding[1]+dilation[1]×(kernel\_size[1]-1)+output\_padding[1]+1\] \[W_{out} = (W_{in}-1)×stride[2]-2×padding[2]+dilation[2]×(kernel\_size[2]-1)+output\_padding[2]+1\]可以运行下面的代码,来理解
import torch
from torch import nn
X = torch.tensor([[0.0, 1.0], [2.0, 3.0]])
K = torch.tensor([[1.0, 1.0, 1.0], [1.0, 1.0, 1.0], [1.0, 1.0, 1.0]])
X, K = X.reshape(1, 1, 2, 2), K.reshape(1, 1, 3, 3)
# 注意kernel_size-padding-1不能小于0
tconv = nn.ConvTranspose2d(1, 1, kernel_size=2, padding=0, bias=False)
tconv = nn.ConvTranspose2d(1, 1, kernel_size=1, padding=0, bias=False)
# tconv = nn.ConvTranspose2d(1, 1, kernel_size=1, padding=1, bias=False)
tconv.weight.data = K
y = tconv(X)
print(y)
1.3 参考代码:
2. mIOU:
2.1 简述:
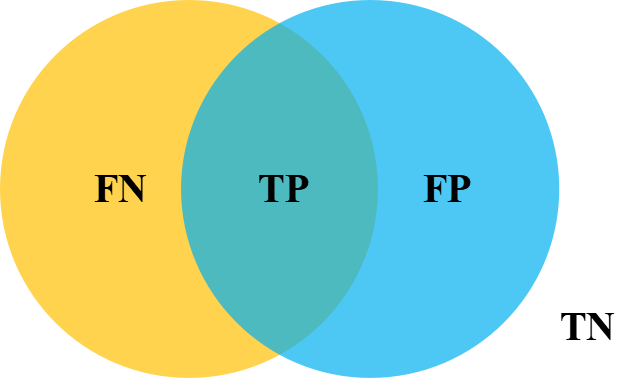
均交并比:Mean Intersection over Union
首先来看下IOU,下图黄色部分代表label,蓝色代表prediction,其中相交部分即为TP,有颜色的区域为二者相并,而mIOU就是该数据集中的每一类的交并比的平均。
2.2 计算
(1)混淆矩阵:
行之和为该类的真实样本数量,列之和是预测为该类的样本数量(随便编的一个矩阵)
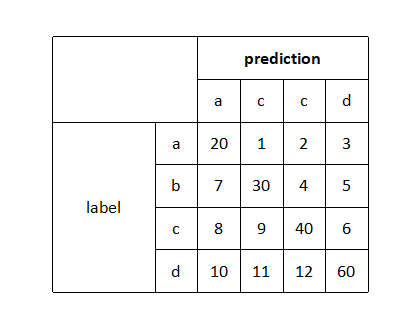
(2)计算mIOU:
针对于每一类IOU:
交:对角线的值
并:行+列-对角线值 IOU=交/并 mIOU=mean(sum(IOU))
3. ResNet+U-Net
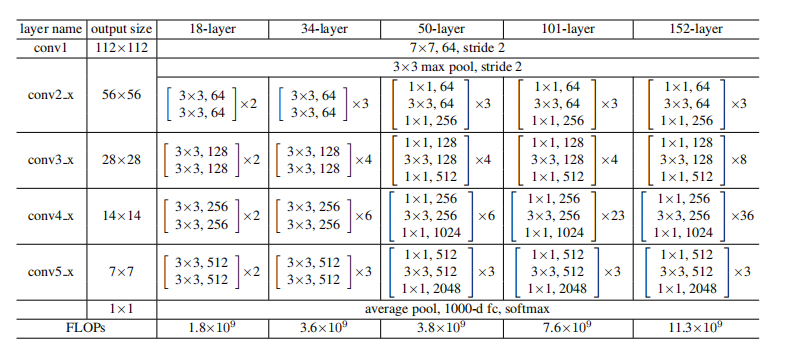
用pytorch中的ResNet作为encoder替换U-Net原始结构,可以用ImageNet的预训练权重来fine-tuning,下图是ResNet原论文中的结构。
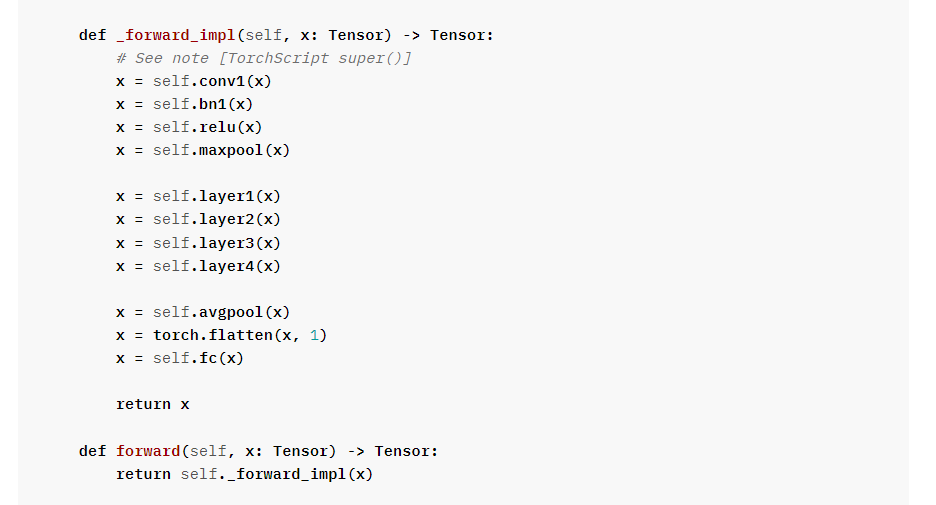
下图是pytorch官方的ResNet34的源码,然后colab的代码,如下。
文档信息
- 本文作者:Guoziyu
- 本文链接:https://mateguo1.github.io/2021/07/01/UNet/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)